High-precision automation and smart manufacturing demand motion control systems that deliver more than movement, they require accuracy, reliability, efficiency, and seamless integration. Direct Drive and Hollow Shaft Motors represent two transformative technologies that eliminate traditional mechanical limitations and unlock new levels of performance in industrial applications.
By removing transmission components and optimizing structural design, these motors enable higher torque density, zero backlash operation, compact system architectures, and superior dynamic response. This article explores how direct drive and hollow shaft motor technologies work, what differentiates them, and why they are becoming essential solutions for next-generation motion systems.
What Is a Direct Drive Motor?
A Direct Drive Motor is a type of electric motor that transmits torque directly to the load without using mechanical transmission components such as gearboxes, belts, pulleys, or couplings. Unlike conventional motor systems that rely on intermediate mechanisms to adjust speed or increase torque, a direct drive system connects the motor rotor directly to the driven shaft. This simplified architecture eliminates mechanical backlash, reduces friction losses, and significantly enhances motion precision.
At its core, direct drive technology is designed to maximize efficiency and control accuracy by removing mechanical complexity. The result is smoother motion, higher dynamic response, and improved long-term reliability, all critical factors in advanced industrial environments.
Core Operating Principle
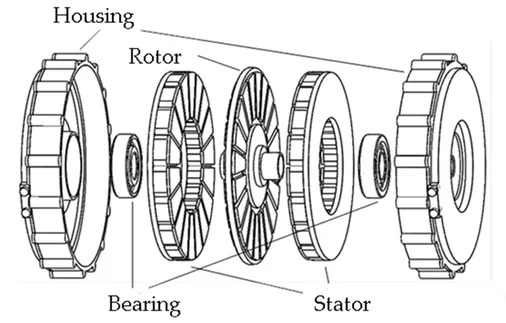
Direct drive motors operate based on electromagnetic interaction between the stator and rotor. When electrical current flows through the stator windings, it generates a magnetic field that interacts with permanent magnets (or electromagnetic structures) on the rotor. This interaction produces torque that rotates the rotor, and because the rotor is directly coupled to the load, torque is transferred instantly and without mechanical delay.
By eliminating gear reduction systems, direct drive motors:
- Remove mechanical backlash
- Minimize vibration and noise
- Reduce energy loss caused by friction
- Deliver consistent torque output
This direct torque transmission allows for extremely precise positioning and repeatability, especially in applications requiring micron-level accuracy.
Key Characteristics of Direct Drive Motors
Direct drive motors are engineered to deliver high performance under demanding conditions. Their defining characteristics include:
1. Zero Backlash Operation: Without gears or belts, there is no mechanical play between the motor and the load. This ensures superior positioning accuracy and repeatability.
2. High Torque Density: Modern direct drive motors use optimized magnetic circuit designs to generate high torque within a compact footprint.
3. Superior Dynamic Response: Direct torque transfer allows rapid acceleration and deceleration, making them ideal for high-speed indexing and precision positioning tasks.
4. Reduced Maintenance Requirements: Fewer mechanical components mean fewer wear parts. This significantly lowers maintenance costs and system downtime.
5. Improved Energy Efficiency: By minimizing friction and transmission losses, direct drive systems convert electrical energy into mechanical motion more efficiently.
Traditional motor systems typically use a standard motor combined with a gearbox to achieve the required torque and speed characteristics. While gearboxes increase torque, they also introduce mechanical complexity, wear, lubrication requirements, noise, and backlash.
Direct drive motors eliminate these compromises by generating high torque at low speeds directly, removing the need for mechanical reduction. This makes them especially suitable for applications where precision, cleanliness, and reliability are critical.
What Is a Hollow Shaft Motor?
A Hollow Shaft Motor is a type of electric motor designed with a central opening through the rotor and shaft, allowing mechanical components, cables, air lines, vacuum tubes, or optical elements to pass directly through the motor’s center. This distinctive structural feature enables more compact, integrated, and flexible system designs, particularly in applications where space optimization and functional integration are critical.

Unlike traditional solid-shaft motors, hollow shaft motors are engineered not only for torque generation and motion control, but also for architectural efficiency within complex machinery. Their design reduces the need for external routing, additional support structures, or extended mechanical assemblies.
Structural Design and Core Concept
The defining characteristic of a hollow shaft motor is its annular (ring-shaped) rotor structure. Instead of a solid central shaft, the motor features:
- A hollow center bore
- An outer rotor design (in many configurations)
- Optimized magnetic flux distribution around the circular structure
This architecture allows the load or auxiliary systems to pass directly through the motor body. For example:
- Rotary tables can integrate pneumatic or hydraulic lines internally
- Robotic joints can route power and signal cables through the axis
- Optical systems can pass laser beams through the motor center
- Inspection systems can integrate camera wiring without external clutter
The result is a cleaner, more compact mechanical design with fewer external components.
How Hollow Shaft Motors Work
Like other high-performance servo or direct drive motors, hollow shaft motors operate using electromagnetic principles. When electrical current energizes the stator windings, a magnetic field is generated that interacts with the rotor’s permanent magnets or electromagnetic structure, producing rotational torque.
The key difference lies not in the torque-generation principle, but in the mechanical geometry:
- The torque is distributed symmetrically around the hollow axis
- The design supports stable, balanced rotation
- Central clearance allows for multi-functional integration
This symmetry enhances mechanical stability, especially in precision rotary applications.
Key Advantages of Hollow Shaft Motors
Hollow shaft motors offer significant performance and integration benefits:
1. Space Optimization: The ability to route components through the motor eliminates the need for external brackets, couplings, and routing structures, reducing overall machine footprint.
2. Simplified System Architecture: By integrating mechanical and electrical pathways within the motor axis, designers can create cleaner, more efficient layouts.
3. Improved Mechanical Balance: Symmetrical torque distribution supports smooth rotation and minimizes radial force imbalances.
4. High Torque in Compact Form: Despite the hollow center, modern magnetic design allows hollow shaft motors to deliver high torque density.
5. Enhanced Design Flexibility: Engineers gain greater freedom in machine layout, particularly in rotary indexing tables, robotics, and automated production lines.
While hollow shaft motors offer architectural advantages, proper system design is essential for optimal performance:
- Bearing Support: Load distribution must be carefully engineered to ensure mechanical stability.
- Thermal Management: Efficient heat dissipation is critical in compact integrated systems.
- Cable and Tube Routing: Internal components must be protected from friction and stress.
- Structural Rigidity: The surrounding mechanical structure must maintain alignment under dynamic loads.
When designed correctly, hollow shaft motors can significantly enhance both machine performance and structural efficiency.
Direct Drive vs Hollow Shaft Motors: Key Differences
Although Direct Drive Motors and Hollow Shaft Motors are often discussed together in advanced motion control systems, they are not interchangeable technologies. One refers primarily to a transmission concept (eliminating mechanical reduction), while the other refers to a structural design (a motor with a central hollow bore). Understanding their differences is essential when selecting the right solution for precision industrial applications.
Below is a structured comparison to clarify how they differ in architecture, performance, and application focus.
1. Conceptual Difference: Transmission vs Structural Design
The most fundamental distinction lies in their engineering purpose:
- Direct Drive Motor → Defines how torque is transmitted. It eliminates gearboxes, belts, and couplings, connecting the motor directly to the load.
- Hollow Shaft Motor → Defines the motor’s mechanical geometry. It features a central hollow opening that allows cables, shafts, or media lines to pass through.
A hollow shaft motor can be designed as a direct drive motor. However, not all direct drive motors are hollow shaft motors. The two technologies can overlap, but they solve different design challenges.
2. Mechanical Structure and Integration
Direct Drive Motors:
- Typically use a solid shaft (though hollow versions exist).
- Focus on eliminating backlash and transmission losses.
- Simplify mechanical systems by removing intermediate components.
Hollow Shaft Motors:
- Feature a ring-shaped rotor with a center bore.
- Allow internal routing of cables, pneumatic lines, vacuum tubes, or optical systems.
- Enable compact, space-efficient system architecture.
If space optimization and internal routing are critical, hollow shaft design offers a clear advantage.
3. Performance Characteristics
| Feature | Direct Drive Motor | Hollow Shaft Motor |
| Backlash | Zero (no gearbox) | Depends on design (often zero if direct drive) |
| Torque Density | High | High (optimized magnetic layout) |
| Dynamic Response | Excellent | Excellent |
| Structural Flexibility | Moderate | Very high |
| Mechanical Simplicity | Very high | High, but requires careful integration |
Direct drive motors prioritize motion precision and efficiency. Hollow shaft motors prioritize system integration and architectural flexibility, while still delivering strong performance.
4. Installation and Design Complexity
Direct Drive Motors:
- Reduce mechanical assembly steps.
- Lower long-term maintenance requirements.
- Require advanced servo control systems.
Hollow Shaft Motors:
- Require precise alignment and bearing design.
- Demand careful cable/tube management inside the hollow axis.
- Offer cleaner external machine layouts.
In highly integrated automation systems, hollow shaft motors may require more detailed upfront engineering, but simplify the overall machine design.
Industrial Applications of Hollow Shaft Motors
Hollow shaft motors are redefining how engineers design compact, high-performance motion systems. By enabling internal routing and structural integration, they eliminate mechanical clutter while preserving precision and torque performance. Below are some of the most impactful industrial applications where hollow shaft motors deliver measurable advantages:
- Robotics (robot wrists, rotary joints, and collaborative robots): Hollow shaft motors allow power cables, signal wires, and pneumatic tubes to pass directly through the joint axis. This reduces external cable drag, improves rotational freedom, enhances durability, and enables cleaner robotic arm design with higher repeatability.
- Rotary indexing tables in automated assembly lines: In high-speed production environments, internal routing of air lines and sensors through the motor center simplifies layout and increases reliability. The symmetrical torque distribution also ensures smooth, stable rotation during rapid indexing cycles.
- Semiconductor wafer handling systems: Cleanroom applications demand minimal particle generation and compact integration. Hollow shaft motors eliminate external mechanical components and allow vacuum lines or precision wiring to pass through the motor axis without compromising accuracy.
- Packaging and labeling machines: High-speed rotary labeling heads benefit from hollow shaft architecture by integrating sensor wiring and compressed air channels directly through the center, reducing machine footprint while maintaining precise synchronization.
- Laser processing and optical systems: The hollow center enables laser beams or optical paths to pass directly through the motor axis. This creates highly aligned, space-efficient rotational stages for cutting, engraving, or inspection systems.
- Medical imaging and diagnostic equipment: Compact and precise rotary movement is critical in CT scanners and other imaging systems. Hollow shaft motors support clean internal routing and smooth, vibration-minimized rotation.
- Automated inspection and vision systems: Camera wiring and data cables can be routed internally, maintaining structural balance and reducing interference during high-speed rotation.
- Printing and precision converting equipment: Hollow shaft motors improve web handling alignment while allowing integration of tension control systems and sensor wiring through the center axis.
Across these applications, hollow shaft motors do more than generate torque, they enable smarter machine architecture. By combining precision motion with structural efficiency, they help engineers design systems that are cleaner, more compact, and better optimized for modern industrial performance demands.
How to Choose the Right Motor for Your Application
Selecting the right motor requires a clear understanding of both performance demands and system architecture. The decision should go beyond basic torque and speed specifications to consider long-term reliability, integration efficiency, and operational stability.
- Define torque and speed requirements first. Calculate continuous torque, peak torque, acceleration time, and duty cycle to ensure the motor can handle real operating conditions without overheating or performance loss.
- Evaluate precision and repeatability needs. Applications such as CNC machining, semiconductor handling, or robotics may require zero backlash and high-resolution feedback systems, making direct drive solutions ideal.
- Analyze space and mechanical constraints. If internal routing of cables, air lines, or shafts is necessary, a hollow shaft motor can significantly simplify system layout and reduce overall footprint.
- Consider thermal management and environment. High-speed or continuous-duty applications require proper heat dissipation, while harsh environments may demand sealed or specially coated designs.
- Assess integration with the control system. Ensure compatibility with servo drives, encoders, and motion controllers to achieve optimal dynamic response and positioning accuracy.
Ultimately, the right motor is not just about power, it’s about selecting a solution that aligns with your machine design, performance expectations, and long-term operational goals.
Conclusion
Direct Drive and Hollow Shaft Motors represent more than incremental improvements in motor technology, they reflect a fundamental shift in how modern motion systems are engineered. By eliminating mechanical transmission components, direct drive technology delivers unmatched precision, zero backlash performance, and superior dynamic response. Meanwhile, hollow shaft design unlocks new levels of integration, enabling compact architectures and smarter machine layouts without compromising torque or stability.
In high-performance industries where accuracy, efficiency, and reliability define competitiveness, choosing the right motor solution can directly impact productivity, maintenance costs, and long-term system value. Whether your priority is ultra-precise positioning, streamlined mechanical design, or a fully integrated motion platform, these advanced motor technologies provide the foundation for next-generation automation.