Reliable startup and smooth torque delivery are fundamental to the performance of any induction motor. However, these qualities can be disrupted by cogging, a torque irregularity caused by the magnetic interaction between stator and rotor teeth. Though often unnoticed during basic system checks, cogging can severely affect low-speed operation, create unwanted noise and vibration, and hinder motor efficiency in precision-driven environments.
To address this challenge effectively, engineers and motor designers must understand the root causes of cogging and apply targeted strategies to reduce or eliminate it through advanced motor design techniques. This article explores the mechanics behind cogging, its impact on motor behavior, and the proven solutions used across high-performance applications.
What is Cogging in Induction Motor?
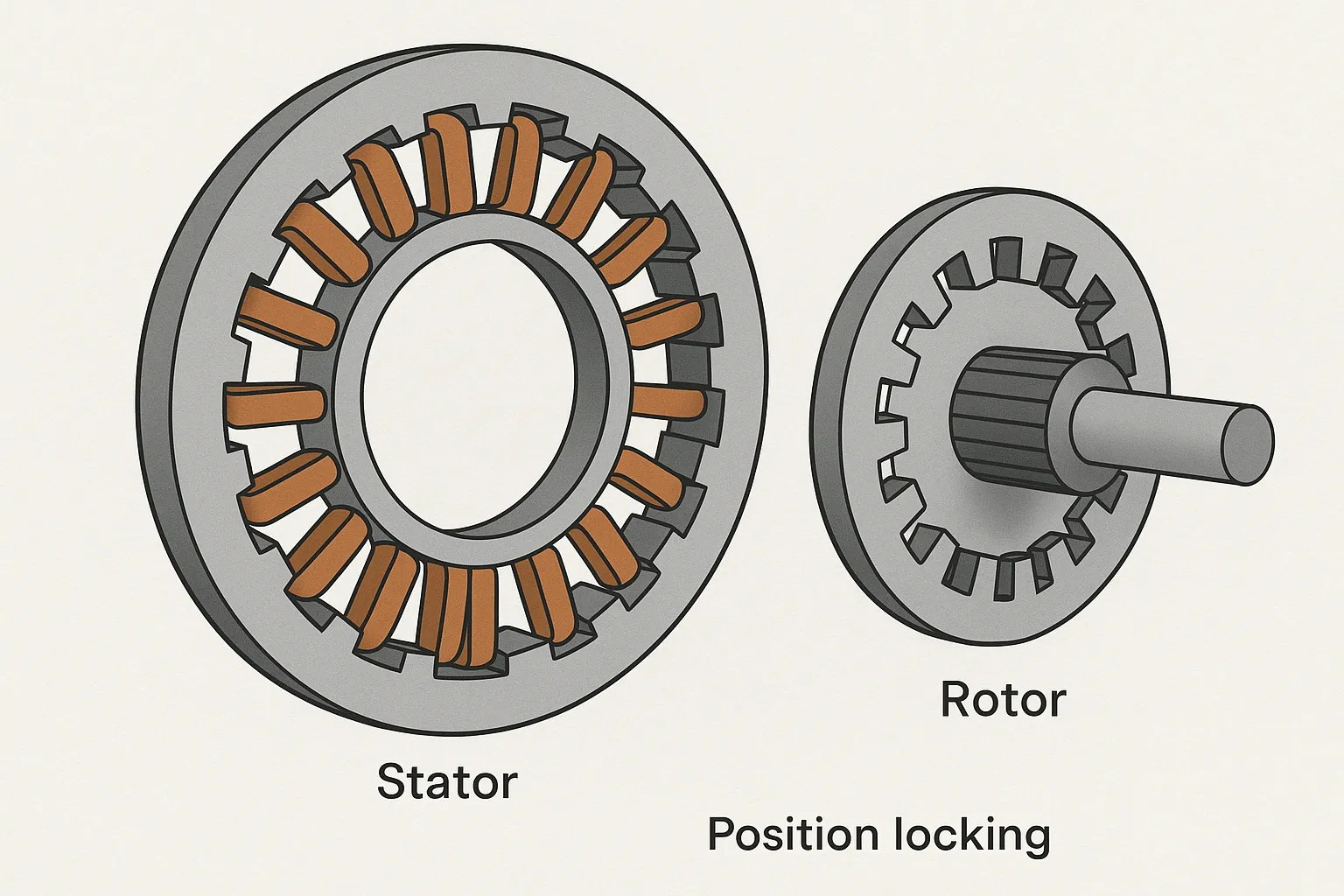
Cogging in an induction motor refers to a phenomenon where the motor rotor tends to resist motion from a standstill due to magnetic locking between the stator and rotor teeth. This magnetic reluctance torque also known as cogging torque is caused by the alignment of stator slots and rotor slots, creating a detent position that prevents smooth startup.
Although cogging is more commonly associated with permanent magnet motors, it can also appear in induction motors, particularly in low-speed or variable-speed applications where torque ripple and starting reliability are critical. When they occur, the rotor may hesitate, vibrate, or even fail to rotate unless sufficient starting torque is applied.
This issue is especially problematic in applications that demand precise motion control, such as automated manufacturing systems, conveyors, or servo-driven mechanisms. In these contexts, any interruption or irregularity in motion can lead to performance degradation, operational delays, or mechanical wear over time.
Causes of Cogging in Induction Motors
Cogging in induction motors occurs due to specific electromagnetic and mechanical factors that interfere with smooth torque production. While often subtle, this issue can become a serious barrier to motor startup and low-speed operation if not addressed in the design phase. Below are the most common causes:
1. Slot Alignment Between Stator and Rotor
One of the main reasons behind cogging is the unfavorable alignment of stator and rotor slots. When the number of slots in both components shares a common factor, strong magnetic attraction occurs at certain positions. This results in the rotor “locking” or hesitating, especially at startup.
2. Magnetic Reluctance Torque
Cogging torque is fundamentally caused by variations in magnetic reluctance as the rotor rotates past the stator teeth. When teeth align, magnetic reluctance is minimized, creating peaks in torque that lead to jerky motion instead of smooth acceleration.
3. Lack of Skewing in Slot Design
Motors without skewed rotor or stator slots are more susceptible to cogging. Straight slot alignment increases the likelihood of magnetic locking. Skewing the rotor or stator slots, twisting them slightly along the motor’s axial length helps spread magnetic forces and reduce effects.
4. Poor Slot Geometry or Manufacturing Inconsistencies
Manufacturing flaws or inconsistent slot geometry can enhance cogging by distorting the uniformity of the magnetic field. Irregular slot width, uneven spacing, or poor alignment of teeth increases torque ripple and makes the motor more vulnerable to this issue.
5. Operation Under Low Load Conditions
Cogging becomes more apparent during low-load or no-load operation, where the motor doesn’t generate enough torque to overcome the cogging torque. This can result in stalled or vibrating motion during startup, especially in precision-driven systems.
Effects of Cogging on Motor Performance
While often underestimated, cogging can significantly compromise the operational quality of an induction motor especially in systems where precise motion and smooth acceleration are required. Its effects are most noticeable at low speeds or during startup, when torque fluctuations cannot be masked by inertia or load momentum.
One of the primary impacts is startup hesitation. When the rotor experiences magnetic locking due to poor slot alignment, it may fail to initiate motion altogether or exhibit a jerky, step-like rotation. This irregular behavior not only disrupts performance but can also damage connected mechanical components over time.
Another common consequence is increased vibration and acoustic noise. Torque pulsations caused by cogging introduce mechanical stress and audible humming, which can be problematic in applications like robotics, conveyors, and CNC machines where stability and silence are critical.
Moreover, long-term exposure to uneven torque can result in accelerated wear of bearings and couplings, reducing the overall lifespan of the motor. Even if the motor eventually reaches its operating speed, the initial disturbance can affect system synchronization, efficiency, and energy consumption.
In high-precision environments, even minor cogging effects can translate to lost accuracy, inconsistent throughput, or quality deviations making it essential to address this issue through design or compensation techniques.
Difference Between Cogging and Crawling
Both cogging and crawling are low-speed anomalies found in induction motors, and while they may appear similar at first glance, their causes, characteristics, and impacts are distinctly different. Understanding how these two issues differ is essential for engineers seeking to optimize motor performance and avoid startup or operational instability.

1. Root Cause and Nature of the Phenomena
Cogging is primarily a magnetic phenomenon caused by the alignment of stator and rotor slots. When these slots are harmonically related, magnetic reluctance torque can cause the rotor to “lock” or resist movement during startup. It usually occurs in motors operating without load and is most prominent in the initial moments when motion is first applied.
In contrast, crawling is a result of harmonic distortion in the motor’s magnetic field, specifically, the presence of 7th or 13th harmonics. These harmonics create a sub-synchronous torque dip, causing the rotor to settle and operate at a stable speed that is much lower than its synchronous speed, often around 1/7th of the rated speed.
2. Observable Effects on Motor Operation
When cogging is present, the motor may fail to start or only move in intermittent steps, especially when there’s insufficient starting torque. It’s a stop-start motion with no continuous rotation unless external torque helps overcome the reluctance barrier.
On the other hand, crawling allows the motor to run continuously, but at a much lower speed than intended. This results in poor performance, lower output, and potentially overheating due to prolonged operation under abnormal conditions.
3. Design Implications and Prevention Methods
Cogging can be minimized through mechanical design adjustments, such as skewing rotor bars, optimizing slot combination, or introducing fractional slot windings. These techniques help distribute magnetic forces more evenly and prevent slot locking.
Crawling, however, requires electromagnetic design improvements, such as adjusting pole-slot combinations, modifying the winding layout, or using specific rotor bar shapes to suppress unwanted harmonics. Sometimes, electronic control methods (like VFD tuning) are also applied to mitigate the effect.
Although both cogging and crawling affect low-speed motor behavior, their underlying mechanisms and solutions are quite different. Cogging is more about physical alignment and magnetic locking, while crawling involves harmonic interference with continuous but sluggish motion. Identifying which phenomenon is present and addressing it appropriately through design or control strategies is crucial to ensuring smooth and reliable induction motor performance.
How to Minimize or Eliminate Cogging
Reducing the torque ripple that disrupts smooth motor operation requires a thoughtful approach to both mechanical and electromagnetic design. Several proven techniques can be applied at the design stage or during motor selection to ensure consistent startup and low-speed performance.
1. Skewing Rotor or Stator Slots
One of the most effective methods is slot skewing, where the rotor or stator slots are intentionally angled rather than aligned axially. This approach helps distribute magnetic forces more evenly as the rotor turns, preventing teeth from aligning perfectly and reducing the locking effect. Skewing not only improves startup behavior but also decreases audible noise and vibration.
2. Optimizing Slot Combinations
Avoiding slot number combinations that share common multiples is essential. When the number of stator and rotor slots are properly chosen to avoid harmonic locking positions, the likelihood of magnetic resistance during startup decreases significantly. This can be achieved using design simulations or empirical models during the motor development process.
3. Using Fractional Slot Windings
Motors designed with fractional slot windings (where the number of slots per pole per phase is a non-integer) offer a more irregular magnetic field distribution, which disrupts the alignment patterns that cause the problem. This results in smoother torque output, particularly beneficial in applications requiring precise low-speed control.
4. Advanced Simulation and Design Tools
Modern motor design often leverages finite element analysis (FEA) and electromagnetic simulation tools to identify and correct potential cogging issues before production. By analyzing slot geometry, magnetic field distribution, and material properties, engineers can optimize motor architecture for minimal torque ripple.
5. Choosing High-Precision Manufacturing
Even the best design can be compromised by poor execution. High-precision machining and strict quality control during manufacturing ensure that slot dimensions, alignments, and magnetic tolerances remain consistent, helping maintain the intended performance and reduce mechanical imperfections that could trigger startup resistance.
While no motor is completely immune to torque irregularities, the right combination of design choices and engineering precision can effectively eliminate the startup resistance often associated with cogging. By focusing on geometry, materials, and simulation-driven development, manufacturers can deliver motors with smoother operation, higher reliability, and improved performance in even the most demanding applications.
Conclusion
Understanding cogging and its impact on induction motor performance is essential for engineers, system integrators, and machine builders aiming to achieve smooth, reliable motion especially in applications that demand precise control and consistent torque output. From its causes rooted in slot alignment and magnetic reluctance, to its effects on startup behavior and vibration, cogging is a phenomenon that can be effectively mitigated through smart design choices such as skewing, optimized slot combinations, and advanced simulation.
At ITG, we are committed to supporting high-performance motion systems by delivering advanced motor technologies that inherently address these challenges. Our range of Linear Motors and Torque Motors is engineered with precision, eliminating many of the low-speed irregularities found in traditional rotary systems.
Whether you’re building next-generation automation, robotics, or CNC equipment, ITG solutions are designed to meet the demands of modern industry with stability, responsiveness, and accuracy at their core.